Cameradar v5.0.2 releases: Hacking RTSP CCTV Cameras

Cameradar
Cameradar allows you to
- Detect open RTSP hosts on any accessible target host
- Detect which device model is streaming
- Launch automated dictionary attacks to get their stream route (e.g.: /live.sdp)
- Launch automated dictionary attacks to get the username and password of the cameras
- Retrieve a complete and user-friendly report of the results
Changelog v5.0.2
- Add new default credentials
- #304 by @supremepot
- #295 by @ArturFormella
- Update install instructions #291 by @Ullaakut
Install
Docker Image for Cameraccess
Install docker on your machine, and run the following command:
docker run -t ullaakut/cameradar -t <target> <other command-line options>
e.g.: docker run -t ullaakut/cameradar -t 192.168.100.0/24 -l will scan the ports 554 and 8554 of hosts on the 192.168.100.0/24 subnetwork and attack the discovered RTSP streams and will output debug logs.
- YOUR_TARGET can be a subnet (e.g.: 172.16.100.0/24), an IP (e.g.: 172.16.100.10), or a range of IPs (e.g.: 172.16.100.10-20).
- If you want to get the precise results of the nmap scan in the form of an XML file, you can add -v /your/path:/tmp/cameradar_scan.xml to the docker run command, before ullaakut/cameradar.
- If you use the -r and -c options to specify your custom dictionaries, make sure to also use a volume to add them to the docker container. Example: docker run -t -v /path/to/dictionaries/:/tmp/ ullaakut/cameradar -r /tmp/myroutes -c /tmp/mycredentials.json -t mytarget
Installing the library
go get github.com/EtixLabs/cameradar
After this command, the cameradar library is ready to use. Its source will be in:
$GOPATH/src/pkg/github.com/EtixLabs/cameradar
You can use go get -u to update the package.
Here is an overview of the exposed functions of this library:
Discovery
You can use the cameradar library for simple discovery purposes if you don’t need to access the cameras but just to be aware of their existence.
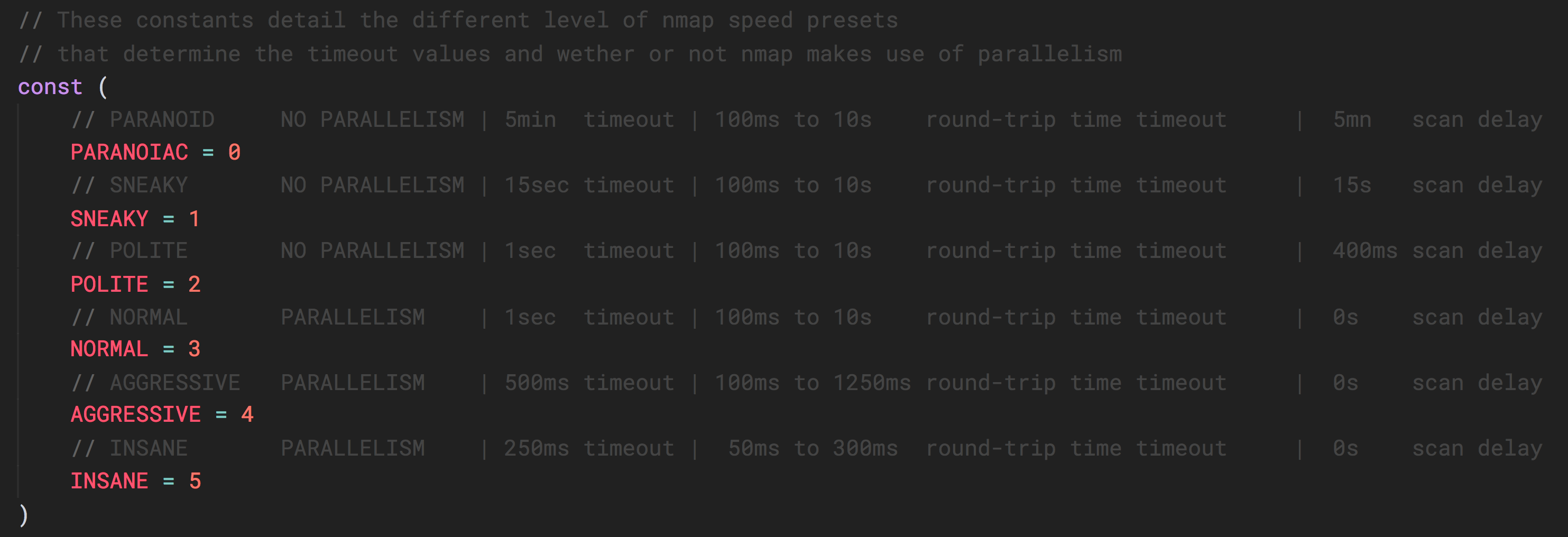
This describes the nmap time presets. You can pass a value between 1 and 5 as described in this table, to the NmapRun function.
Attack
If you already know which hosts and ports you want to attack, you can also skip the discovery part and use directly the attack functions. The attack functions also take a timeout value as a parameter.
Data models
Here are the different data models used to use the exposed functions of the cameradar library.
Dictionary loaders
The cameradar library also provides two functions that take file paths as inputs and return the appropriate data models filled.
Configuration
The RTSP port used for most cameras is 554, so you should probably specify 554 as one of the ports you scan. Not specifying any ports to the cameraccess application will scan the 554 and 8554 ports.
docker run -t ullaakut/cameradar -p “18554,19000-19010” -t localhost will scan the ports 18554, and the range of ports between 19000 and 19010 on localhost.
You can use your own files for the ids and routes dictionaries used to attack the cameras, but the Cameradar repository already gives you a good base that works with most cameras, in the /dictionaries folder.
docker run -t -v /my/folder/with/dictionaries:/tmp/dictionaries \
ullaakut/cameradar \
-r “/tmp/dictionaries/my_routes” \
-c “/tmp/dictionaries/my_credentials.json” \
-t 172.19.124.0/24
This will put the contents of your folder containing dictionaries in the docker image and will use it for the dictionary attack instead of the default dictionaries provided in the cameradar repo.
Check camera access
If you have VLC Media Player, you should be able to use the GUI or the command-line to connect to the
RTSP stream using this format : rtsp://username:password@address:port/route
With the above result, the RTSP URL would be rtsp://admin:12345@173.16.100.45:554/live.sdp
Command line options
- “-t, –target”: Set custom target. Required.
- “-p, –ports”: (Default: 554,8554) Set custom ports.
- “-s, –speed”: (Default: 4) Set custom nmap discovery presets to improve speed or accuracy. It’s recommended to lower it if you are attempting to scan an unstable and slow network, or to increase it if on a very performant and reliable network. See this for more info on the nmap timing templates.
- “-T, –timeout”: (Default: 1000) Set the custom timeout value in milliseconds after which an attack attempt without an answer should give up.
- “-r, –custom-routes”: (Default: dictionaries/routes) Set custom dictionary path for routes
- “-c, –custom-credentials”: (Default: dictionaries/credentials.json) Set custom dictionary path for credentials
- “-o, –nmap-output”: (Default: /tmp/cameradar_scan.xml) Set custom nmap output path
- “-l, –log”: Enable debug logs (nmap requests, curl describe requests, etc.)
- “-h” : Display the usage information
Copyright 2017 Ullaakut
Source: https://github.com/EtixLabs/